Environment & Arena
Physical Layout¶
The arena of the Mobile Manipulation Track will be a 6x4m closed arena with two tables. See the example in Figure 1 below.
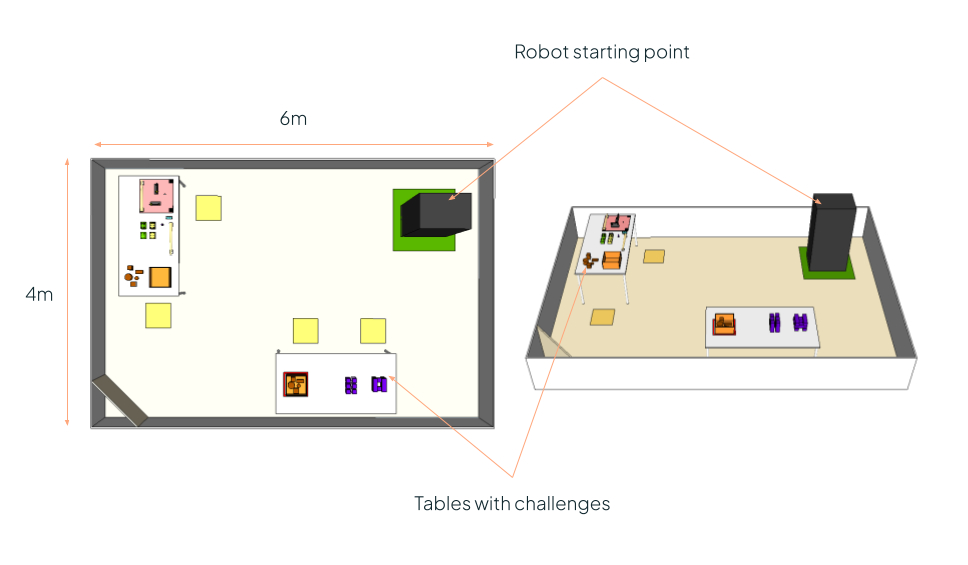
Figure 1: 11th RGMC tentative arena for MMT.
- The starting position of the robot will be the same for all runs
- The positions of the tables can be different in different runs, but would always allow the robot to pick and place the objects for all the tasks
- The positions of the objects on the table will be all different in different runs
Terrain¶
The terrain would be flat with no slopes or ramps, and the only obstacles would be the tables where to perform the tasks
Objects¶
Need input from NIST here
Lighting & environmental conditions¶
The lighting and environmental conditions will be those in the venue of the 2026 IEEE/RAS International Conference on Robotics and Automation (ICRA).
Known vs unknown elements¶
The only change between runs will be the position of the tables and the positions of the objects for the tasks on the tables.